
今回は、RPLiDARを使って点群情報を取得し可視化してみようと思います。このシリーズの1回目ではRPLiDARの概要や種類について、2回目ではRPLiDARの仕組みについて説明しました。


専用のROSパッケージの導入
まず最初に、RPLiDARからROSを使って点群を取得、可視化してみます。専用のROSパッケージはSLAMTECが公開しているのでそれを使用します。パッケージ名はrplidar_rosです。

rplidar_rosを以下のコマンドを実行して導入してください。
cd ~/catkin_ws/src
git clone https://github.com/Slamtec/rplidar_ros.git
cd ..
catkin_makeROSをインストールしていない方は、ROSをインストールするか、Docker経由でROSのデスクトップ環境を手に入れてください。私の場合は、ROS(noetic)がインストール済みのUbuntuのPCを使用しているので、そのまま実行しました。
Dockerを用いたROSデスクトップ環境の導入方法は、以下の記事の「DockerでROSのデスクトップ環境の作成」をご参考ください。
Rvizで可視化する
RPLiDARにはいくつかの種類があるので、所有しているRPLiDARに合わせてプログラムを実行します。RPLiDARごとのroslaunchは以下の通り。
| A1/A2 | roslaunch rplidar_ros view_rplidar.launch |
| A3 | roslaunch rplidar_ros view_rplidar_a3.launch |
| S1 | roslaunch rplidar_ros rplidar_s1.launch |
| S2 | roslaunch rplidar_ros rplidar_s2.launch |
今回、私が使用するのはA2なので、表の1行目のroslaunchを実行します。
cd ~/catkin_ws
source devel/setup.bash # 必要があれば
roslaunch rplidar_ros view_rplidar.launch実行すると、Rvizが起動し、取得された点群が表示されます。
以下の動画は、Rvizで点群を取得しながら、LiDARの回転を手で強制的に遅くしても点群がずれないことを確認したところです。
ノードとトピックの調査
以下のコードによりRvizを起動せずにRPLiDARを動かすことができます。
roslaunch rplidar_ros rplidar.launchここで、新しくターミナルを起動して、nodeやtopicの詳細を確認してみましょう。nodeを確認するときはrosnode list、トピックを確認するときはrostopic listを実行します。このとき、確認できた情報は下の表のとおりです。
| ノード | /rplidarNode |
| トピック | /scan |
/scanトピックのメッセージ型をrostopic type /scanで確認すると、sensor_msgs/LaserScanであることが確認できます。試しに、rostopic echo /scanを実行したときに得られたデータを以下に示します。
header:
seq: 6414
stamp:
secs: 1663748061
nsecs: 132936350
frame_id: "laser"
angle_min: -3.1415927410125732
angle_max: 3.1415927410125732
angle_increment: 0.008278241381049156
time_increment: 0.00011606113548623398
scan_time: 0.08809040486812592
range_min: 0.15000000596046448
range_max: 12.0
ranges: [inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 0.19599999487400055, 0.19599999487400055, 0.19599999487400055, inf, inf, inf, inf, 0.3009999990463257, 0.3009999990463257, 0.3009999990463257, 0.2980000078678131, 0.2980000078678131, 0.30000001192092896, 0.30000001192092896, 0.30000001192092896, 0.30300000309944153, 0.30300000309944153, 0.30300000309944153, inf, inf, inf, inf, 0.296999990940094, 0.296999990940094, 0.296999990940094, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 0.6150000095367432, 0.6150000095367432, 0.6150000095367432, 0.6200000047683716, 0.6200000047683716, inf, inf, inf, 0.20000000298023224, 0.20000000298023224, 0.20000000298023224, 0.19599999487400055, 0.19599999487400055, 0.19300000369548798, 0.19300000369548798, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 0.13099999725818634, 0.13099999725818634, 0.13099999725818634, 0.12999999523162842, 0.12999999523162842, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 0.13099999725818634, 0.13099999725818634, 0.13099999725818634, 0.13199999928474426, 0.13199999928474426, 0.13600000739097595, 0.13600000739097595, 0.16200000047683716, 0.16200000047683716, 0.16200000047683716, 0.16200000047683716, 0.16099999845027924, 0.16099999845027924, 0.16099999845027924, 0.16099999845027924, 0.16099999845027924, 0.16099999845027924, 0.16099999845027924, inf, inf, inf, inf, inf, inf, 0.21400000154972076, 0.21400000154972076, 0.21400000154972076, inf, inf, 0.21199999749660492, 0.21199999749660492, 0.21199999749660492, inf, inf, inf, inf, inf, inf, inf, 0.4970000088214874, 0.4970000088214874, 0.4970000088214874, inf, inf, inf, inf, 0.21899999678134918, 0.21899999678134918, 0.21899999678134918, inf, 0.2150000035762787, 0.2150000035762787, 0.2150000035762787, 0.21199999749660492, 0.21199999749660492, 0.210999995470047, 0.210999995470047, 0.210999995470047, 0.210999995470047, 0.20600000023841858, 0.20600000023841858, 0.20600000023841858, 0.2070000022649765, 0.2070000022649765, 0.20900000631809235, 0.20900000631809235, 0.20999999344348907, 0.20999999344348907, 0.20999999344348907, 0.210999995470047, 0.210999995470047, 0.210999995470047, 0.2150000035762787, 0.2150000035762787, 0.21699999272823334, 0.21699999272823334, 0.21699999272823334, 0.2199999988079071, 0.2199999988079071, inf, inf, inf, 0.20999999344348907, 0.20999999344348907, 0.20999999344348907, 0.21799999475479126, 0.21799999475479126, inf, inf, inf, 0.2199999988079071, 0.2199999988079071, 0.2199999988079071, inf, 0.22300000488758087, 0.22300000488758087, 0.22300000488758087, 0.22599999606609344, 0.1420000046491623, 0.1420000046491623, 0.14100000262260437, 0.14100000262260437, inf, inf, inf, inf, 0.24199999868869781, 0.24199999868869781, 0.24199999868869781, inf, 0.25, 0.25, 0.25, inf, 0.2540000081062317, 0.2540000081062317, 0.2540000081062317, inf, inf, inf, inf, inf, inf, inf, 0.17800000309944153, 0.17800000309944153, 0.17800000309944153, 0.17399999499320984, 0.17399999499320984, 0.18000000715255737, 0.18000000715255737, 0.17800000309944153, 0.17800000309944153, 0.17599999904632568, 0.17599999904632568, 0.1720000058412552, 0.1720000058412552, 0.16899999976158142, 0.16899999976158142, 0.16599999368190765, 0.16599999368190765, 0.16300000250339508, 0.16300000250339508, 0.16300000250339508, 0.16300000250339508, 0.16300000250339508, 0.1770000010728836, 0.1770000010728836, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 0.13600000739097595, 0.13600000739097595, 0.13600000739097595, 0.13500000536441803, 0.13500000536441803, 0.42100000381469727, 0.42100000381469727, 0.42100000381469727, inf, inf, inf, inf, inf, 0.382999986410141, 0.382999986410141, 0.382999986410141, 0.38199999928474426, 0.38199999928474426, 0.3930000066757202, 0.3930000066757202, inf, inf, inf, inf, inf, 0.24899999797344208, 0.24899999797344208, 0.24899999797344208, inf, inf, inf, 0.2549999952316284, 0.2549999952316284, 0.2549999952316284, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 0.15199999511241913, 0.15199999511241913, 0.15199999511241913, 0.15000000596046448, 0.15000000596046448, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 0.6050000190734863, 0.6050000190734863, 0.6050000190734863, 0.5870000123977661, 0.5870000123977661, 0.5809999704360962, 0.5809999704360962, 0.5820000171661377, 0.5820000171661377, 0.5830000042915344, 0.5830000042915344, 0.5830000042915344, 0.5879999995231628, 0.5879999995231628, inf, inf, inf, inf, 0.39500001072883606, 0.39500001072883606, 0.39500001072883606, 0.39500001072883606, 0.39500001072883606, 0.39500001072883606, 0.4020000100135803, 0.4020000100135803, 0.4020000100135803, inf, 0.3700000047683716, 0.3700000047683716, 0.3700000047683716, 0.367000013589859, 0.3709999918937683, 0.3709999918937683, 0.3709999918937683, 0.3869999945163727, 0.3869999945163727, inf, inf, inf, inf, inf, inf, 0.2029999941587448, 0.2029999941587448, 0.2029999941587448, 0.19599999487400055, 0.19599999487400055, 0.19599999487400055, 0.19099999964237213, 0.18799999356269836, 0.18799999356269836, 0.18700000643730164, 0.18700000643730164, 0.1860000044107437, 0.1860000044107437, 0.1860000044107437, 0.1860000044107437, 0.1860000044107437, 0.18700000643730164, 0.18700000643730164, 0.1860000044107437, 0.1860000044107437, 0.18199999630451202, 0.18199999630451202, 0.17900000512599945, 0.17900000512599945, 0.17800000309944153, 0.17800000309944153, 0.17800000309944153, 0.17800000309944153, 0.17800000309944153, 0.17800000309944153, 0.17800000309944153, 0.17900000512599945, 0.17900000512599945, 0.18000000715255737, 0.18000000715255737, 0.18299999833106995, 0.18299999833106995, 0.19200000166893005, 0.19200000166893005, 0.19699999690055847, 0.19699999690055847, inf, inf, inf, inf, 0.18199999630451202, 0.18199999630451202, 0.18199999630451202, 0.18000000715255737, 0.18000000715255737, 0.18000000715255737, 0.18000000715255737, 0.1809999942779541, 0.1809999942779541, 0.18199999630451202, 0.18199999630451202, 0.18199999630451202, 0.20200000703334808, inf, 0.22699999809265137, 0.22699999809265137, 0.22699999809265137, 0.2409999966621399, inf, inf, inf, 0.25999999046325684, 0.25999999046325684, 0.25999999046325684, inf, 0.2669999897480011, 0.2669999897480011, 0.2669999897480011, 0.2709999978542328, 0.27300000190734863, 0.27300000190734863, 0.27300000190734863, 0.27900001406669617, 0.28600001335144043, 0.28600001335144043, 0.28600001335144043, 0.2930000126361847, 0.2930000126361847, 0.2930000126361847, 0.3019999861717224, 0.3019999861717224, 0.3019999861717224, 0.3100000023841858, inf, 0.32100000977516174, 0.32100000977516174, 0.32100000977516174, 0.3319999873638153, 0.3319999873638153, 0.34200000762939453, 0.34200000762939453, 0.34200000762939453, 0.35199999809265137, 0.35199999809265137, 0.35199999809265137, 0.35199999809265137, 0.382999986410141, 0.382999986410141, 0.382999986410141, 0.37299999594688416, 0.37299999594688416, 0.39500001072883606, 0.39500001072883606, 0.39399999380111694, 0.39399999380111694, 0.39399999380111694, 0.4050000011920929, 0.4050000011920929, 0.4230000078678131, 0.4230000078678131, 0.4230000078678131, 0.4230000078678131, 0.44200000166893005, 0.44200000166893005, 0.44200000166893005, 0.44200000166893005, 0.44200000166893005, 0.44200000166893005, 0.4449999928474426, inf, inf, inf, inf, inf, inf, 5.0980000495910645, 5.0980000495910645, 5.0980000495910645, 5.052999973297119, 5.052999973297119, 5.320000171661377, 5.320000171661377, 5.359000205993652, 5.359000205993652, 5.359000205993652, 5.349999904632568, 5.349999904632568, 5.315000057220459, 5.315000057220459, 5.316999912261963, 5.316999912261963, 5.125, 5.125, 5.107999801635742, 5.107999801635742, 5.140999794006348, 5.140999794006348, 5.140999794006348, 5.169000148773193, 5.169000148773193, 5.160999774932861, 5.160999774932861, 5.127999782562256, 5.127999782562256, inf, 4.938000202178955, 4.938000202178955, 4.938000202178955, 4.9679999351501465, 4.9679999351501465, 4.9679999351501465, 3.885999917984009, 3.885999917984009, 3.4660000801086426, 3.4660000801086426, 3.2839999198913574, 3.2839999198913574, 3.0989999771118164, 3.0989999771118164, 2.9019999504089355, 2.9019999504089355, 2.799999952316284, 2.799999952316284, 2.7739999294281006, 2.7739999294281006, 2.515000104904175, 2.515000104904175, 2.503000020980835, 2.503000020980835, 2.503000020980835, 2.503000020980835, 2.503000020980835, 2.3389999866485596, 2.3389999866485596, 2.3499999046325684, 2.3499999046325684, 2.3510000705718994, 2.3510000705718994, 2.378999948501587, 2.378999948501587, 2.4700000286102295, 2.4700000286102295, 2.4700000286102295, 2.440999984741211, 2.440999984741211, 2.4769999980926514, 2.4769999980926514, 2.506999969482422, 2.506999969482422, 2.5, 2.5, 2.492000102996826, 2.492000102996826, 2.5260000228881836, 2.5260000228881836, 2.562999963760376, 2.562999963760376, 2.562999963760376, 2.6010000705718994, 2.6010000705718994, 2.638000011444092, 2.638000011444092, 2.6589999198913574, 2.6589999198913574, 2.7100000381469727, 2.7100000381469727, 2.753000020980835, 2.753000020980835, 2.7990000247955322, 2.7990000247955322, 2.7990000247955322, 2.8310000896453857, 2.8310000896453857, inf, inf, inf, inf, 1.309999942779541, 1.309999942779541, 1.309999942779541, 1.3179999589920044, 1.3179999589920044, 1.3179999589920044, 1.3240000009536743, 1.3240000009536743, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 1.1469999551773071, 1.1469999551773071, 1.1469999551773071, 0.15000000596046448, 0.15000000596046448, 0.15000000596046448, 0.15000000596046448, 0.15000000596046448, 0.15000000596046448, 0.15000000596046448, 0.15000000596046448, 0.15000000596046448, 0.14900000393390656, 0.14900000393390656, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 1.5889999866485596, 1.5889999866485596, 1.5889999866485596]
intensities: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 47.0, 47.0, 47.0, 0.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 47.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 47.0, 47.0, 47.0]
---ここで注目していただきたいのは、sensor_msgs/LaserScan型のデータ構造についてと送られる数値に関してです。LaserScanは以下のような構造をしています。
header:
seq: 6414
stamp:
secs: 1663748061
nsecs: 132936350
frame_id: "laser"
angle_min: -3.1415927410125732
angle_max: 3.1415927410125732
angle_increment: 0.008278241381049156
time_increment: 0.00011606113548623398
scan_time: 0.08809040486812592
range_min: 0.15000000596046448
range_max: 12.0
ranges: [・・・]
intensities: [・・・]
---| header | トピックが発行されたときの時間などの情報が格納される |
| angle_min | 下限角度[rad] |
| angle_max | 上限角度[rad] |
| angle_increment | 下限角度から上限角度までの刻み角度[rad] |
| time_increment | 取得された点の時間間隔[sec] |
| scan_time | すべての点群を取得するのに要した時間[sec] |
| range_min | 取得できる最小距離[m] |
| range_max | 取得できる最大距離[m] |
| ranges | すべての点のLiDARからの距離[m]で、range_minからrange_maxの範囲外のものはinf |
| intensities | 計測された光の強さ |
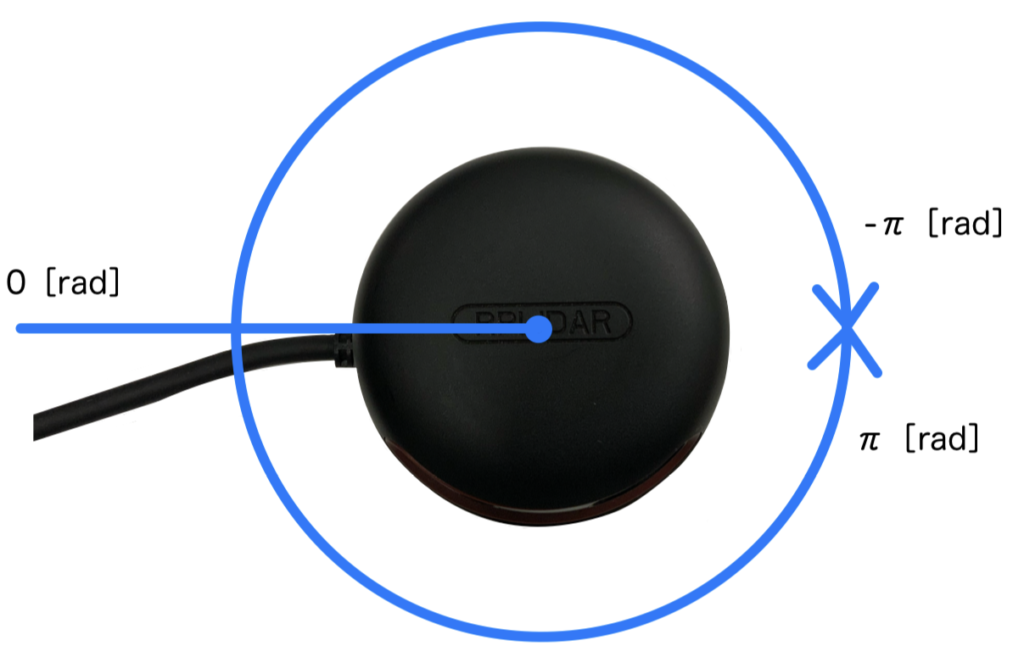
今回使用したRPLiDAR A2M8は、\(-\pi\)から\(+\pi\)の範囲(正確な範囲はこれより若干狭い)を0.008278241381049156[rad]刻みで計測することから、電卓で計算すると760点が得られることがわかります。ちなみに、A2M8の0度と角度の正方向の関係は以下の図のとおりです。RPLiDARを上から見たときに、コードの出ている付近が0[rad](点のインデックスとしては379 or 380)で、配線付近から右回りに180度のあたりが\(-\pi\)[rad](点のインデックスとしては0)、配線付近から左回りに180度のあたりが\(+\pi\)[rad](点のインデックスとしては759)となります。
また、time_incrementに取得できる点数の760を乗算すると、scan_timeになります。
pythonで可視化してみよう
今回は、PythonでRPLiDARから出力された/scanトピックからリアルタイムで可視化するツールを作成してみます。
可視化であれば、Rvizでできるので、自分で作る必要性はないですが、ROSやPythonの勉強を兼ねてという感じですね。
今回は、lazerscan_vizというパッケージを作成します。
cd catkin_ws/src
catkin_create_pkg rplidar_pyviz rospy sensor_msgsパッケージを作成したら、roscd rplidar_pyviz/srcを実行してフォルダを移動し、以下のコードをrplidar_pyviz.pyとして保存します。
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import LaserScan
import numpy as np
import matplotlib.pyplot as plt
def callback(msg):
global num_points
global x
global y
r = np.array(msg.ranges)
for i in range(num_points):
theta = msg.angle_min + msg.angle_increment * i
x[i] = -r[i] * np.cos(theta)
y[i] = -r[i] * np.sin(theta)
x[-1] = -r[-1] * np.cos(msg.angle_max)
y[-1] = -r[-1] * np.sin(msg.angle_max)
if __name__ == '__main__':
rospy.init_node('rplidar_pyviz', anonymous=True)
rospy.Subscriber("/scan", LaserScan, callback)
global num_points
global x
global y
num_points = 760
x = np.zeros(num_points)
y = np.zeros(num_points)
fig, ax = plt.subplots()
while not rospy.is_shutdown():
ax.cla()
ax.set_xlim(-15, 15)
ax.set_ylim(-15, 15)
ax.grid(True)
ax.scatter(x, y)
plt.draw()
plt.pause(0.1)
rospy.spin()保存したら、以下のコードを実行して、実行権限を与えます。
sudo chmod +x rplidar_pyviz.pyそうしたら、以下のコードを実行して、RPLiDARを起動して、今作ったプログラムを実行します。
roslaunch rplidar_ros rplidar.launch
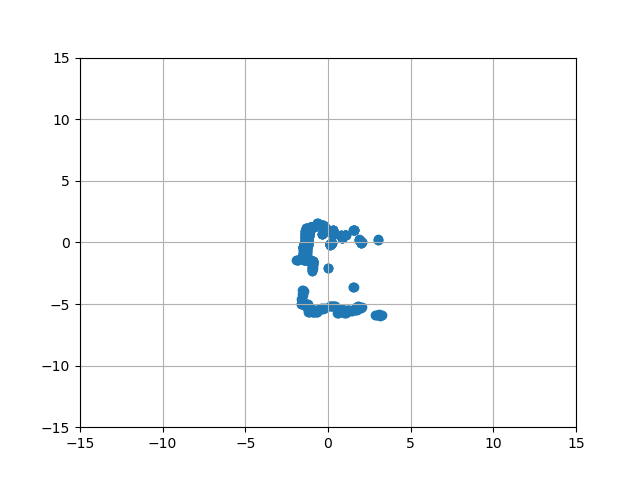
rosrun rplidar_pyviz rplidar_pyviz.py下図右に示したようにLiDARのコードが出ている方を表示された座標のx軸正方向に合わせて置くと、正しい向きで点群情報を可視化することができます。

さいごに
今回は、RPLiDARからROS経由でデータを取得して可視化してみました。RPLiDARシリーズは終了ですが、Autowareシリーズなどを実施していきたいと思います。